



























Quando immaginiamo un robot umanoide pensiamo quasi automaticamente a mani con cinque dita, articolazioni simili alle nostre e movimenti che imitano quelli umani. È una delle immagini più radicate: robot che aprono porte, prendono oggetti e interagiscono con il mondo come farebbe una persona.
Eppure, quando si esce dalla fantascienza e si entra nei magazzini automatizzati, nelle linee produttive o nei reparti di logistica, la realtà segue un’altra strada. Nell’industria il problema non è costruire una mano che assomigli alla nostra: è costruire un sistema che lavori meglio della nostra.
I nuovi robot devono manipolare oggetti sempre diversi tra loro, spesso fragili, deformabili, irregolari, morbidi o con forme poco prevedibili.
Una mano antropomorfa, per quanto sofisticata, non è necessariamente la soluzione più veloce o più efficiente. Anzi, in molti casi può diventare più complessa da gestire.
Pensiamo a un magazzino logistico che deve movimentare nello stesso momento scatole di cartone, buste, confezioni alimentari, prodotti cosmetici, materiali plastici e oggetti dalle forme irregolari: un sistema rigido progettato per un singolo tipo di presa non sarebbe efficace.
È qui che entrano in gioco tecnologie come il vuoto che permettono ai robot di adattarsi a oggetti differenti, riducendo la complessità meccanica e aumentando velocità e precisione.
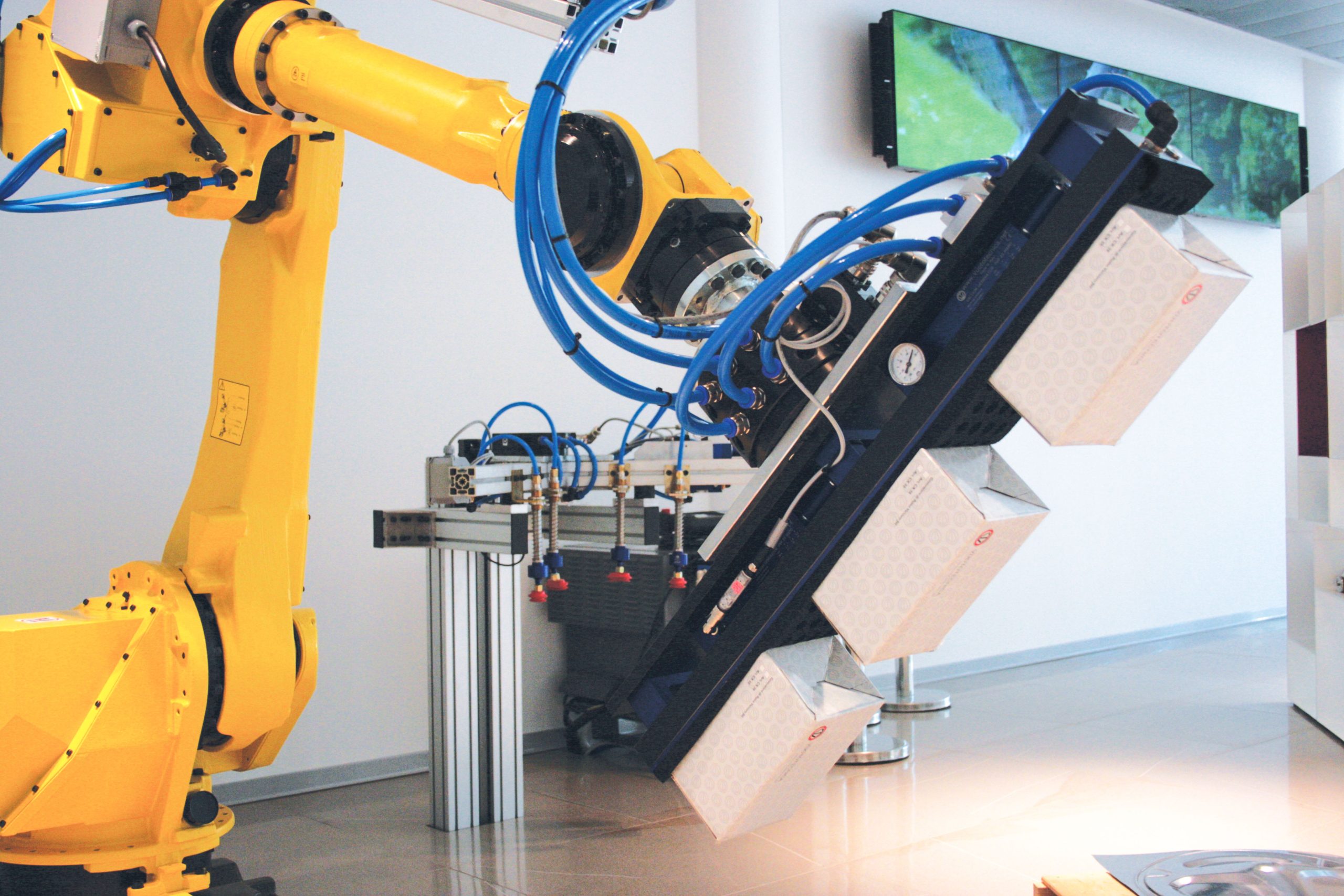
Una ventosa non ha bisogno di imitare il movimento di un dito umano: deve creare il contatto corretto e garantire una presa affidabile nel minor tempo possibile.
È proprio questa filosofia che si ritrova nelle soluzioni presenti nel catalogo di Vuototecnica con soluzioni modulari pensate per essere integrate su robot e sistemi automatici, capaci di adattarsi a superfici e oggetti molto diversi tra loro.
Accanto alle configurazioni tradizionali trovano spazio anche sistemi come la serie Octopus, progettata per movimentare prodotti con forme variabili o superfici non perfettamente uniformi grazie a una superficie di aspirazione ampia e adattabile.
In contesti come logistica, packaging o movimentazione di materiali difficili, questo tipo di approccio permette di ridurre cambi formato, semplificare l’automazione e aumentare la versatilità. Ma anche le fonti di vuoto e gli accessori possono fare la differenza.
Non esiste infatti un unico tipo di prodotto da movimentare: esistono superfici lisce o porose, materiali rigidi o delicati, forme regolari o estremamente variabili. Per questo anche ventose, supporti, compensatori e altri sistemi diventano elementi di un ecosistema pensato per adattarsi a ogni applicazione.
La produzione non è più quella di qualche decennio fa, fatta di lunghissime serie identiche tra loro, ma richiede continui cambi di formato, maggiore personalizzazione e capacità di adattamento.
I robot del futuro probabilmente avranno ancora due braccia e magari persino un volto, ma non è affatto detto che avranno mani identiche alle nostre.
La tecnologia più interessante sarà proprio quella che all’inizio si nota meno.












